
MAKALAH MATEMATIKA KELAS 11: TRANSFORMASI
Jumat, Januari 26, 2018
Tambah Komentar
BAB I
TRANSFORMASI GEOMETRI
A. Pengertian dan Jenis-Jenis Transformasi
1. Pengertian Transformasi Geometri
Transformasi Geometri atau lebih sering disebut transformasi adalah mengubah setiap koordinat titik (titik-titik dari suatu bangun) menjadi koordinat lainnya pada bidang dengan satu aturan tertentu. Misalnya, transformasi T terhadap titik P(x, y) menghasilkan bayangan P’(x’ , y’),
2. Jenis-Jenis Transformasi
Transformasi pada bidang terdiri atas 4 jenis, yaitu : translasi(pergeseran), refleksi (pencerminan), rotasi (perputaran), dan dilatasi(perbesaran/perkalian).
a. Translasi (Pergeseran)
Translasi adalah transformasi yang memindahkan setiap titik pada bidang menurut jarak dan arah tertentu. Jarak dari arah suatu translasi dapat dilambangkan dengan garis berarah, misalnya AB atau vektor . Perhatikan Gambar dibawah ini:
Gambar : T menggeser titik A ke titik A’
Contoh :
1. Tentukan bayangan P (2,3) oleh translasi T = ! Lengkapilah dengan gambar!
Jawab:
x’ = x + a = 2 + 4 = 6
y’ = y + b = 3 + 3 = 6
Jadi, bayangan P (2,3) oleh translasi T = adalah P’ (6,6).
Gambar:
2. Translasi T memetakan A (2, 3) menjadi A’ (5, -1).
a. Tentukan translasi T!
b. Tentukan bayangan dari titik B (4, 5) oleh translasi T tersebut!
Jawab :
a.
x’ = x + a 5 = 2 + a sehingga a = 3
y’ = y + b -1 = 3 + b sehingga b = - 4
Jadi, translasi T adalah T =
b.
x’ = 4 + 3 = 7
y’ = 5 + (-4) = 1
Jadi, bayangan dari B(4, 5) adalah B’ (7, 1)
b. Refleksi (Pencerminan)
Refleksi atau sering disebut dengan istilah pencerminan adalah suatu transformasi dengan memindahkan setiap titik pada bidang dengan menggunakan sifat-sifat pencerminan pada cermin datar (bayangan cermin dari titik-titik) yang akan dipindahkan. Pencerminan dilambangkan Mi dengan imenyatakan jenis pencerminan.
1) Pencerminan terhadap Sumbu X, Sumbu Y, Garis y = x, dan Garis y = -x
Perhatikan Gambar dibawah ini:
· Jika P(a, b) dicerminkan terhadap sumbu X maka bayangannya adalah P’(a, -b), dapat ditulis
· Jika P(a, b) dicerminkan terhadap sumbu Y maka bayangannya adalah P’(-a, b), dapat ditulis
· Jika P(a, b) dicerminkan terhadap titik asal O (0, 0) maka bayangannya adalah P’(-a, -b), dapat ditulis
· Jika P(a, b) dicerminkan terhadap garis y = x maka bayangannya adalahP’ (b, a), dapat ditulis
· Jika P(a, b) dicerminkan terhadap garis y = -x maka bayangannya adalahP’ (-b, -a), dapat ditulis
2) Pencerminan terhadap Garis x = h dan garis y = k
Perhatikan Gambar dibawah ini:
· Jika P(a, b) dicerminkan terhadap garis x = h maka bayangannya adalahP’ (2h – a, b), dapat ditulis
· Jika P(a, b) dicerminkan terhadap garis y = k maka bayangannya adalahP’ (a, 2k - b), dapat ditulis
Contoh :
1. Tentukan bayangannya jika:
a. A(3, 5) dicerminkan terhadap sumbu X
b. B(4, -2) dicerminkan terhadap sumbu Y
c. C(2, -5) dicerminkan terhadap titik asal O(0, 0)
d. D(-7, 2) dicerminkan terhadap garis y = x
e. E(-5, -4) dicerminkan terhadap garis y = -x
f. F(2, -3) dicerminkan terhadap garis x = 3
g. G(-1, 7) dicerminkan terhadap garis y = 4
Jawab:
a.
b.
c.
d.
e.
f.
g.
2. Jika titik A(2, 1) dicerminkan terhadap garis x = a menghasilkan bayanganA’ (4, 1) maka tentukan nilai a!
Jawab :
x’ = 2a – x sehingga 4 = 2a – 2
6 = 2a
3 = a
c. Rotasi (Perputaran)
Rotasi adalah transformasi yang memetakan setiap titik pada bidang ke titik lainnya dengan cara memutar pada pusat titik tertentu.
Rotasi atau perputaran pada bidang datar ditentukan oleh hal-hal berikut.
a. Pusat perputaran
b. Arah perputaran
c. Besar sudut perputaran
Pusat perputaran suatu rotasi terdiri atas dua, yaitu di titik O(0, 0) dan di titik A(x, y). Sementara itu, arah perputaran suatu rotasi dapat berlawanan arah jarum jam (disebut rotasi positif) dan dapat pula searah jarum jam (disebut rotasi negatif). Bayangan dari rotasi suatu titik dapat kita tentukan sebagai berikut.
ü Rotasi terhadap Titik Pusat O(0, 0)
· Jika P(a, b) diputar sebesar berlawanan arah jarum jam (rotasi positif), dengan pusat rotasi di O(0, 0), maka bayangan yang terjadi sebagai berikut.
a’ = a cos – b sin
b’ = a sin + b cos
= P’ (a cos – b sin , a sin + b cos )
· Jika P(a, b) diputar sebesar searah jarum jam (rotasi negatif), dengan pusat rotasi di O(0, 0), maka bayangan yang terjadi sebagai berikut.
a’ = a cos + b sin
b’ = -a sin + b cos
= P’ (a cos + b sin , - a sin + b cos )
ü Rotasi terhadap Titik A (x, y)
Jika P(a, b) diputar sebesar dengan pusat rotasi di A (x, y), maka bayangan yang terjadi sebagai berikut.
= P’ [(a – x) cos - (b – y) sin , (a – x) sin + (b – y) cos )]
|
Gambar : Rotasi positif sebuah segitiga terhadap titik pusat O(0, 0) sebesar 90o.
|
Catatan : Rotasi yang berlawanan arah dengan jarum jam sudut rotasinya diberi tanda positif (+). Rotasi yang searah jarum jam sudut rotasi diberi tanda negatif (-).
Contoh :
1. Tentukan bayangan dari A(5, 4) jika dirotasi 90o berlawanan arah dengan jarum jam dengan pusat rotasi O(0, 0)!
Jawab :
A(5, 4) = A(a, b)
Pusat rotasi O(0, 0)
a’ = a cos 90o – b sin 90o maka a’ = 5 cos 90o – 4 sin 90o = -4
b’ = a sin 90o+ b cos 90o maka b’ = 5 sin 90o+ 4 cos 90o = 5
Jadi, bayangan dari A(5, 4) adalah A’(-4, 5)
d. Dilatasi (Perkalian)
Dilatasi adalah transformasi yang mengubah ukuran atau skala suatu bangun geometri (pembesaran/pengecilan), tetapi tidak mengubah bentuk bangun tersebut. Dilatasi pada bidang datar ditentukan oleh hal-hal berikut.
a. Pusat dilatasi
b. Faktor dilatasi
Pusat dilatasi terdiri atas dua, yaitu di titik O(0, 0) dan di titik A (x, y). Sementara itu, faktor dilatasi dapat bersifat positif (pembesarannya searah) dan dapat pula bersifat negatif (pembesarannya berlawanan arah). Faktor dilatasi disebut juga dengan faktor skala.
Pada dilatasi suatu bangun faktor K akan menentukan ukuran dan letak bangun bayangan.
(I) Jika K > 1, maka bangun bayangan diperbesar dan terletak sepihak terhadap pusat dilatasi dan bangun semula.
(II) Jika 0 < K < 1, maka bangun bayangan diperkecil dan terletak sepihak terhadap pusat dilatasi dan bangun semula.
(III) Jika -1 < K < 0, maka bangun bayangan diperkecil dan terletak berlainan pihak terhadap pusat dilatasi dan bangun semula.
(IV) Jika K < -1, maka bangun bayangan diperbesar dan terletak berlainan terhadap pusat dilatasi dan bangun semula.
Bayangan dari dilatasi suatu titik dapat kita tentukan sebagai berikut.
ü Dilatasi dengan Pusat di O(0, 0)
Jika P(a, b) didilatasikan dengan faktor skala k dan pusat dilatasi di O, maka bayangannya sebagai berikut.
P’ (ka, kb)
ü Dilatasi dengan Pusat di Titik A(x, y)
= P’ [x + k (a – x), y + k (b – y)]
|
Gambar : Dilatasi dengan pusat dilatasi O dan faktor skala 2 (pembesaran 2 kali)
|
Contoh :
1. Tentukan bayangan A(2, 3) hasil dilatasi dengan faktor skala 4 dan pusat dilatasi O(0, 0)! Lengkapi dengan gambar!
Jawab :
a’ = k a = 4. 2 = 8
b’ = k b = 4. 3 = 12
Jadi, A’ (8, 12)
2. Tentukan bayangan B(-1, 4) hasil dilatasi dengan faktor skala 3 dan pusat dilatasi P(2, 5)! Lengkapi dengan gambar!
Jawab :
a’ = k (a – x) + x= 3 (-1 – 2) + 2= -7
b’ = k (b – y) + y = 3 ( 4 – 5) + 5 = 2
Jadi, B’ ( -7, 2)
B. Matriks yang Bersesuaian dengan Transformasi
Misalkan suatu transformasi T memetakan titik P ( a, b) menjadi P’ (a’, b’). Hubungan antara titik dan bayangannya dapat dinyatakan dalam bentuk persamaan
a’ = pa + qb
dan dalam bentuk lain menjadi =
b’ = ra + sb
Bentuk dari disebut dengan istilah matriks transformasi .
Beberapa matriks transformasi yang bersesuaian dengan operasi transformasi yang telah kamu pelajari sebagai berikut :
No.
|
Transformasi
|
Pemetaan
|
Matriks yang Bersesuaian
|
1.
|
Pencerminan terhadap sumbuX
|
(a, b) (a, -b)
| |
2.
|
Pencerminan terhadap sumbuY
|
(a, b) (-a, b)
| |
3.
|
Pencerminan terhadap O (0, 0)
|
(a, b) (-a, -b)
| |
4.
|
Pencerminan terhadap garis y= x
|
(a, b) (b, a)
| |
5.
|
Pencerminan terhadap garis y= - x
|
(a, b) (-b, -a)
| |
6.
|
Rotasi terhadap titik O (0, 0) sebesar
|
(a, b) (a’, b’ )
a’ = a cos - b sin
b’ = a sin + bcos
| |
7.
|
Rotasi terhadap titik O (0, 0) sebesar
|
(a, b) (-b, a)
| |
8.
|
Rotasi terhadap titik O (0, 0) sebesar
|
(a, b) (-a, -b)
| |
9.
|
Rotasi terhadap titik O (0, 0) sebesar
|
(a, b) (-b, -a)
| |
10.
|
Rotasi terhadap titik O (0, 0) sebesar
|
(a, b) ( ka, kb)
|
Matriks rotasi dan dilatasi pada tabel diatas merupakan rotasi dan dilatasi yang berpusat di titik O(0, 0). Untuk rotasi dan dilatasi yang berpusat di titikA( x , y) perhatikan dengan baik uraian berikut :
1. Rotasi Sebesar dengan Pusat di Suatu Titik A( x , y)
dengan = +
2. Dilatasi dengan Faktor Skala k dengan Pusat di Suatu Titik A( x , y)
dengan = +
3. Transformasi dengan Matriks
Jika P(a, b) ditransformasi dengan matriks dengan p, q, r, dan smerupakan bilangan real, maka bayangannya adalah = .
Contoh :
1. Tentukan bayangan dari titik P(2, 3) jika ditransformasikan oleh matriks !
Jawab :
P’ = = =
Jadi P’ ( 13, 10)
2. Tentukan bayangan dari segitiga A(1, 2), B(3, 7), dan C(1, 8) jika dicerminkan terhadap sumbu X!
Jawab :
A’ B’ C’
=
=
Jadi, A’ (1, -2 ), B’ ( 3, -7), C’ (1, -8)
C. Komposisi Transformasi
Komposisi transformasi adalah dua transformasi yang digunakan secara berurutan. Sebagai contoh, translasi T1 yang dilanjutkan dengan translasi T2 terhadap titik P (a, b) dapat kita tulis
.
Persamaan diatas dapat kita baca “T2 komposisi T1 terhadap P (a, b) menghasilkan P” (a”, b”)”.
1. Komposisi Dua Translasi
Jika T1 = dan T2 = , maka T1 º T2 = + = dan T2 º T1 = + = . Ternyata T1º T2 = T2 º T1 , maka komposisi dua translasi yang berurutan bersifat komutatif.
Contoh :
Diketahui : T1 = , T2 = , dan P(2, 5).
Tentukan : a. T1 º T2 P b. T2 º T1 P
a. T1 º T2 P(2, 5) = T1 º = T1 º
= + = P’’(4, 9)
b. T2 º T P(2, 5) = T2 º = T2 º
= + = P’’(4, 9)
2. Komposisi Dua Refleksi
a. Komposisi Refleksi terhadap Dua Garis yang Sejajar Sumbu Y
Jika : M1 = refleksi terhadap garis x = h
M2 = refleksi terhadap garis x = k
Maka :
1)
Jadi, .
2)
Jadi, .
Contoh :
Diketahui : M1 = Mx = 3
dan P(2, 4)
M2 = Mx = 3
Tentukan :
a) M1 º M2 P(2, 4)
b) M2 º M1 P(2, 4)
Jawab :
a) M1 º M2 P(2, 4) = = P’(8, 4)
= = P”(-2, 4)
Jadi, M1 º M2 P(2, 4) P”(-2, 4).
b) M2 º M1 P(2, 4) = = P’(4, 4)
= = P”(6, 4)
Jadi, M2 º M1 P(2, 4) P”(6, 4).
Kesimpulan: M1 º M2 P M2 º M1 P.
b. Komposisi Refleksi terhadap Dua Garis yang Sejajar Sumbu X
Jika : M1 = refleksi terhadap garis y = h
M2 = refleksi terhadap garis y = k
Maka :
1)
Jadi, .
2)
Jadi, .
c. Komposisi Refleksi terhadap Dua Garis yang Saling Tegak Lurus
1) Komposisi Refleksi terhadap Garis x = h dan y = k
a) Refleksi terhadap Garis x = h Dilanjutkan terhadap Garis y = k
Jadi, .
b) Refleksi terhadap Garis y = k Dilanjutkan terhadap Garis x = h
Jadi, .
Kesimpulannya:
Mx=h º My=k = My=k º Mx=h
2) Komposisi Refleksi terhadap Sumbu Y dan X
a) Refleksi terhadap Sumbu Y Dilanjutkan terhadap Sumbu X
Jadi, .
b) Refleksi terhadap Sumbu X Dilanjutkan terhadap Sumbu Y
Jadi, .
Kesimpulannya : My º Mx = Mx º My
3) Komposisi Refleksi terhadap Garis y = x dan y = -x
a) Refleksi terhadap Garis y = x Dilanjutkan terhadap Garis y = -x
Jadi, .
b) Refleksi terhadap Garis y =- x Dilanjutkan terhadap Garis y = x
Jadi, .
Kesimpulannya : My=x º My=-x = My=-x º My=x
d. Komposisi Refleksi terhadap Dua Garis Yang Saling Berpotongan
Perhatikan Gambar dibawah ini: Komposisi Refleksi
Garis g1 dan g2 berpotongan di titik O, maka
g1 O g2 =
POg1 = g1OP’ = 1
P’Og2 = g2OP” = 2
1 + 2=
POP” = 1 + 1 2 + 2
= 2 ( 1 + 2) = 2
Berdasarkan rumusan di atas, bayangan titik P(a, b) yang dihasilkan dari komposisi refleksi terhadap dua garis yang saling berpotongan di titik O (0, 0) dapat kita tulis sebagai berikut :
=
3. Komposisi Dua Rotasi yang Berurutan dengan Pusat yang Sama
Perhatikan Gambar dibawah ini: Komposisi Rotasi
Titik P(a, b) diputar sebesar 1 dengan pusat O(0, 0) dilanjutkan diputar sebesar 2 dengan pusat yang sama. Berdasarkan gambar tersebut, suatu titik yang dirotasi sebesar 1 dilanjutkan dengan rotasi sebesar 2 bersesuaian dengan rotasi tunggal sebesar ( 1 + 2) dengan pusat rotasi yang sama.
Bayangan titik P(a, b) yang dihasilkan dari komposisi dua rotasi yang berurutan dengan pusat rotasi di titik O(0, 0) dapat kita tulis sebagai berikut:
P” = =
4. Komposisi Dua Dilatasi yang Berurutan dengan Pusat yang Sama
Jika P(a, b) mengalami dilatasi dengan faktor skala k1 dilanjutkan dilatasi dengan faktor skala dengan pusat yang sama, yaitu di O(0, 0), maka bayangannya dapatkita tulis sebagai berikut:
P” = = =
Jadi, bayangannya P” (k1k2a, k1k2b).
Contoh :
1. Titik P(3, 4) dirotasi sebesar 45o dengan pusat putaran di O(0, 0), kemudian dilanjutkan dengan rotasi sebesar 15o dengan pusat yang sama. Tentukan bayangan dari titik P tersebut.
Jawab :
P” = = =
= =
Jadi , bayangannya P” = .
2. Tentukan bayangan dari titik P(2, -4) jika mengalami dilatasi dengan faktor skala 3 dan pusat dilatasi di titik O(0, 0), kemudian dilanjutkan dilatasi dengan faktor skala -4 dan pusat dilatasi yang sama!
Jawab:
= =
= =
Jadi, bayangannnya adalah P”(-24, 48).
5. Komposisi Transformasi yang Dinyatakan dengan Matriks
Misalkan M1 = , M2 = dan P(a, b).
Maka = M1 º M2
= M2 º M1
Catatan : Karena perkalian dua matriks tidak komutatif, maka M1 º M2 M2 ºM1
Contoh :
1. Diketahui : M1 = , M2 = .
Tentukan : a. M1 º M2 P(3, 5) b. M2 º M1 P(3, 5)
Jawab :
a. M1 º M2 P(3, 5)
= = = =
Jadi, P” (55, 111).
b. M2 º M1 P(3, 5)
= = = =
Jadi, P” (-3, 139).
Terbukti bahwa M1 º M2 P M2 º M1P.
D. Luas Bangun Hasil Transformasi
Jika suatu matriks transformasi menentukan bangun B menjadi bangunB’, maka luas B’ sama dengan nilai mutlak determinan matriks tersebut dikalikan luas bangun mula-mula.
Luas bangun B’ = X luas bangun B.
|
Contoh :
Tentukan peta (bayangan) dari ABC jika A(2, 1), B(10, 1), dan C(5,7) ditransormasikan oleh matriks . Tentukan pula bayangan segitiga yang terbentuk!
Jawab:
= =
Jadi, A(7, 7), B(23, 15), dan C(31,40).
Luas ABC = = 24
Luas ABC = X Luas ABC
= satuan luas
Jadi, luas bayangan segitiga yang terbentuk adalah satuan luas.
BAB II
APLIKASI TRANSFORMASI GEOMETRI
1. Penggunaan Transformasi Geometri Dalam Mengedit Foto
Mungkin kita tidak sadar bahwa selama ini kita sudah sering menggunakan rumus transformasi geometri sehari-hari. Contohnya ketika kita mengedit sebuah foto dengan software seperti Adobe Photoshop sebetulnya kita sedang melakukan transformasi geometri. Kita tidak sadar karena yang melakukan perhitungan (perkalian matriks) adalah komputer.
Sebuah gambar sebetulnya adalah sebuah matriks yang sangat besar. Gambar di bawah ini adalah matriks berukuran 320 (baris) x 240 (kolom). Dan setiap element berisi angka dari 0 sampai 16,777,215 yang menunjukkan warna suatu titik. Ada 76,800 elemen dari matriks 320 x 240 tersebut yang berarti ada 76,800 titik yang berwarna.
Dalam prakteknya, gambar yang berupa matriks 320 x 240 ini ketika dibuka di editor photo seperti Photoshop, untuk setiap elemennya masih "ditambahkan" informasi berupa matriks [x,y] yang menunjukkan titik kordinat di mana tirik itu ditampilkan di dalam canvas.
Ketika kita melakukan zoom in/ zoom out sebetulnya kita melakukan transformasi geometri titik-titik [x,y] dengan transformasi yang disebut dilatasi dengan faktor skala pembesaran dalam persen. Misalnya kita bisa zoom out 200% artinya skalanya adalah 2.
Kegiatan editing flip horizontally atau vertically sebetulnya adalah transformasi geometri refleksi terhadap sumbu-y dan sumbu-x. Sedangkan kegiatan rotasi juga mewakili transformasi geometri rotasi.
Proses transformasi geometri dilatasi, translasi, refleksi dan rotasi di atas dilakukan terhadap kordinat (x,y) setiap elemen tanpa mengubah nilai elemen warna tersebut sehingga kita masih mendapatkan gambar yang sama, hanya berubah posisi atau ukurannya saja.
Kita bisa juga melakukan transformasi terhadap gambarnya dengan mengalikan matriks gambar tersebut dengan suatu filter. Ada beberapa filter yang tersedia seperti blur, sharpen edges, dll. Dengan menambil filter-filter tersebut sebetulnya kita mengalikan matriks gambar kita dengan suatu matriks filter.
2. Penggunaan Geometri Transformasi dalam Karya Seni Batik di Indonesia
A. Bentuk Geometri pada Batik
Batik merupakan karya seni warisan budaya bangsa milik Indonesia. Keindahan batik telah diakui dunia melalui penetapan UNESCO sejak 2 Oktober 2009 bahwa batik merupakan salah satu warisan kemanusiaan untuk karya lisan dan non bendawi (Masterpieces of the Oral and Intangible Heritage of Humanity). Karya seni batik tidak hanya didominasi dari budaya Jawa, karena sesungguhnya daerah-daerah lain di Indonesia juga memiliki karya seni lukis kain (jika boleh disebut demikian) atau batik. Lukisan bernilai seni tinggi dapat kita jumpai pada ornamen kain ulos (batak), sasirangan (Kalimantan Selatan), maupun dari belahan Indonesia lainnya yaitu batik Papua, batik Sulawesi dan sebagainya. Hal ini menunjukkan bahwa betapa kayanya budaya kita.
Keindahan batik dapat dinikmati dari bentuk-bentuk artistik yang dituangkan pada lembaran kain tersebut. Bila diamati secara seksama, dalam bentuk-bentuk batik sesungguhnya terdapat sifat-sifat keteraturan yang berirama atau berpola. Beberapa bentuk keteraturan pada batik merupakan bentukan transformasi geometris.
Bentuk geometri yang dapat dijumpai pada batik berupa titik, garis dan bidang datar. Bidang datar tersebut misalnya lingkaran, elips, segiempat dan sebagainya. Bentukan artistik pada batik dihasilkan melalui transformasi titik, garis atau bidang datar tersebut melalui translasi (pergeseran), rotasi (perputaran), refleksi (pencerminan) atau dilatasi (perkalian).
B. Aplikasi Refleksi (Pencerminan) pada Motif Batik
Berikut ini adalah salah satu motif batik Kawung.
Berikut ini adalah salah satu motif batik Kawung.
{kind=link}
{kind=link}
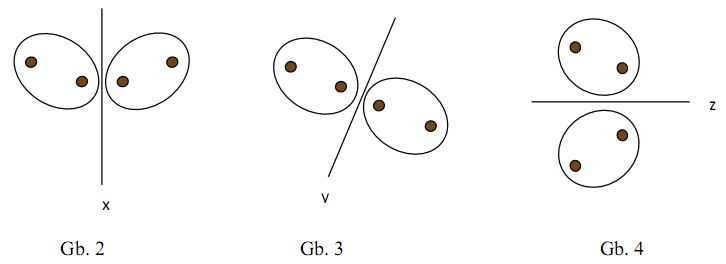
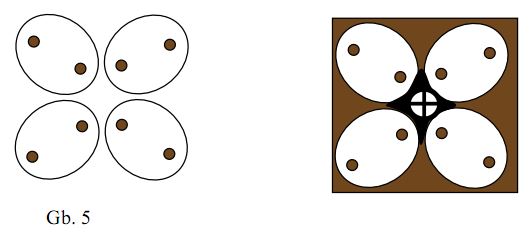
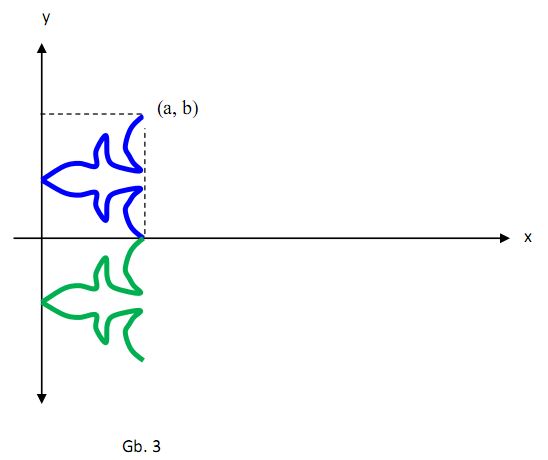
Bentukan pada motif batik kawung dapat dipandang sebagai hasil refleksi (pencerminan) bentuk dasar. Hasil pencerminan gambar 1 pada garis x, y, dan z menghasilkan orientasi bentuk sebagai berikut (Gb. 2, Gb. 3, dan Gb.4).
{kind=link}
{kind=link}
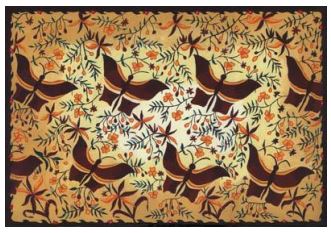
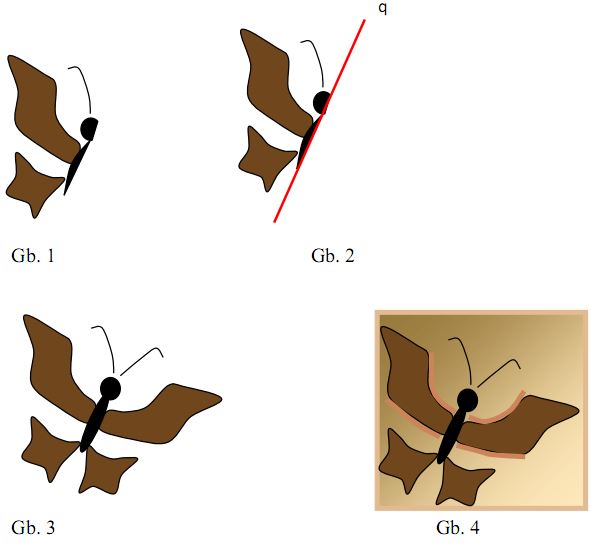
Berikut ini adalah salah satu motif batik Madura.
{kind=link}
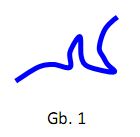
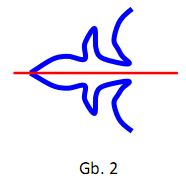
Perhatikan bentuk kupu-kupu pada motif batik Madura tersebut. Bentuk kupu-kupu tersebut simetris, sehingga dapat dipandang sebagai hasil pencerminan beberapa bangun datar terhadap sumbu simetrinya.
Bentuk dasarnya adalah garis lengkung dan beberapa bentuk bangun datar (Gb. 1). Kemudian dicerminkan terhadap sumbu simetrinya yaitu garis q (Gb. 2), sehingga diperoleh bentuk utuh seekor kupu-kupu (Gb. 3).
{kind=link}
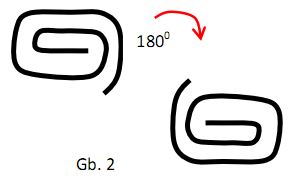
C. Aplikasi Rotasi (Perputaran) pada Motif Batik
Berikut ini adalah salah satu motif batik Papua.
Berikut ini adalah salah satu motif batik Papua.
{kind=link}
{kind=link}
{kind=link}
Bentuk lainnya diperoleh dengan cara refleksi terhadap garis vertikal (Gb.3) dan kemudian diputar 180 derajat (Gb. 4)
{kind=link}
{kind=link}
D. Aplikasi Translasi (Pergeseran) pada Motif Batik
Berikut ini adalah salah satu motif sasirangan (Kalimantan) yang disebut dengan ombak sinampar karang.
{kind=link}
{kind=link}
Selanjutnya penggabungan dari pencerminan bentuk dasar (Gb.1) terhadap garis horisontal menghasilkan bentuk mirip kelopak bunga (Gb. 2).
{kind=link}
Misalkan motif mirip kelopak bunga tersebut diletakkan pada sumbu cartesius, maka bentuk kelopak bunga selanjutnya diperoleh melalui translasi atau pergeseran vektor berikut ini (Gb. 3).
{kind=link}
{kind=link}
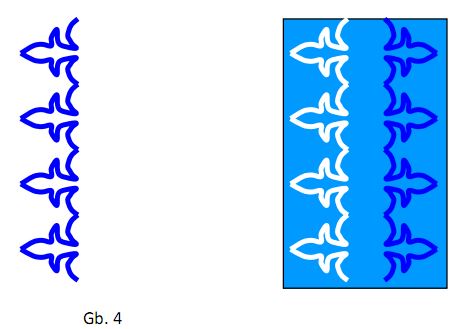
Dan seterusnya translasi dilakukan dengan menggunakan rumus vektor dengan n adalah bilangan asli sehingga diperoleh rangkaian kelopak bunga yang membentuk motif ombak sinampar karang berikut ini (Gb. 4).
{kind=link}
{kind=link}
E. Aplikasi Dilatasi (Perkalian) pada Motif Batik
Berikut ini adalah salah satu motif sasirangan kangkung kaumbakan.
Berikut ini adalah salah satu motif sasirangan kangkung kaumbakan.
{kind=link}
Perhatikan motif mirip bunga teratai pada sasirangan tersebut. Bentuk dasar dari bunga teratai tersebut adalah bangun datar (Gb. 1) yang dapat dipandang sebagai kelopak bunga teratai, kemudian melalui beberapa rotasi dan refleksi diperoleh susunan kelopak bunga membentuk teratai (Gb. 2).
{kind=link}
Bunga teratai yang terlukis pada motif kangkung kaumbakan di atas memiliki ukuran yang berbeda-beda, dimana besar atau kecilnya ukuran bunga dapat dipandang sebagai hasil dilatasi atau perkalian dengan suatu konstanta k terhadap bentuk gambar 2 dimana k adalah bilangan riil posituf. Selanjutnya, bentuk gambar 2 disebut sebagai B.
Misalkan k1=2, maka bentuk k1B adalah perbesaran dua kali B, sebut saja hasil k1B=B1 (Gb. 3). Kemudian untuk memperoleh bentuk bunga teratai selanjutnya dengan mengambil k2=1/3, sebut saja hasil k2B=B2 (Gb.4).
{kind=link}
Untuk mendapatkan letaknya yang artistik pada tangkai, selanjutnya B2 direfleksikan pada garis vertikal sehingga diperoleh susunan membentuk motif kangkung kaumbakan (Gb.5).
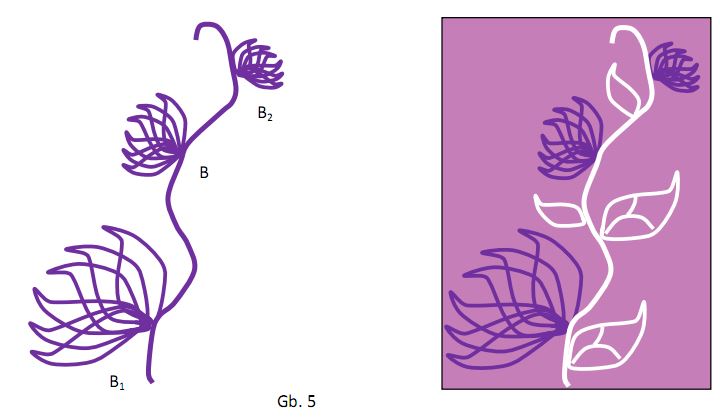{kind=link}
Demikian beberapa contoh aplikasi geometri transformasi dalam karya seni batik di Indonesia. Pola bentuk pada motif batik dapat menjadi alternatif sumber belajar matematika bagi siswa kita.
Contoh lainnya yang dapat kita ambil ialah bermain catur, permainan komedi putar, permainan baling-baling, menggunakan teleskop, kipas angin, perpindahan jarak (berjalan, berlari), membuka sekrup, bercermin, pertumbuhan dan lain-lain ini adalah aplikasi dari transformasi geometri dalam kehidupan sehari-hari.
BAB III
KESIMPULAN
1. Transformasi Geometri atau lebih sering disebut transformasi adalah mengubah setiap koordinat titik (titik-titik dari suatu bangun) menjadi koordinat lainnya pada bidang dengan satu aturan tertentu.
2. Transformasi pada bidang terdiri atas 4 jenis, yaitu : translasi(pergeseran), refleksi (pencerminan), rotasi (perputaran), dan dilatasi(perbesaran/perkalian).
a. Translasi (Pergeseran)
Translasi adalah transformasi yang memindahkan setiap titik pada bidang menurut jarak dan arah tertentu. Jarak dari arah suatu translasi dapat dilambangkan dengan garis berarah, misalnya atau vektor .
b. Refleksi (pencerminan)
Refleksi atau sering disebut dengan istilah pencerminan adalah suatu transformasi dengan memindahkan setiap titik pada bidang dengan menggunakan sifat-sifat pencerminan pada cermin datar (bayangan cermin dari titik-titik) yang akan dipindahkan.
ü Pencerminan terhadap Sumbu X, Sumbu Y, Garis y = x, dan Garis y = -x
· Jika P(a, b) dicerminkan terhadap sumbu X maka bayangannya adalah P’(a, -b), dapat ditulis
· Jika P(a, b) dicerminkan terhadap sumbu Y maka bayangannya adalah P’(-a, b), dapat ditulis
· Jika P(a, b) dicerminkan terhadap titik asal O (0, 0) maka bayangannya adalah P’(-a, -b), dapat ditulis
· Jika P(a, b) dicerminkan terhadap garis y = x maka bayangannya adalahP’ (b, a), dapat ditulis
· Jika P(a, b) dicerminkan terhadap garis y = -x maka bayangannya adalahP’ (-b, -a), dapat ditulis
ü Pencerminan terhadap Garis x = h dan garis y = k
· Jika P(a, b) dicerminkan terhadap garis x = h maka bayangannya adalahP’ (2h – a, b), dapat ditulis
· Jika P(a, b) dicerminkan terhadap garis y = k maka bayangannya adalahP’ (a, 2k - b), dapat ditulis
c. Rotasi (Perputaran)
Rotasi adalah transformasi yang memetakan setiap titik pada bidang ke titik lainnya dengan cara memutar pada pusat titik tertentu. Pusat perputaran suatu rotasi terdiri atas dua, yaitu di titik O(0, 0) dan di titik A(x, y). Sementara itu, arah perputaran suatu rotasi dapat berlawanan arahjarum jam (disebut rotasi positif) dan dapat pula searah jarum jam (disebut rotasi negatif). Bayangan dari rotasi suatu titik dapat kita tentukan sebagai berikut.
ü Rotasi terhadap Titik Pusat O(0, 0)
· Jika P(a, b) diputar sebesar berlawanan arah jarum jam (rotasi positif), dengan pusat rotasi di O(0, 0), maka bayangan yang terjadi sebagai berikut.
a’ = a cos – b sin
b’ = a sin + b cos
= P’ (a cos – b sin , a sin + b cos )
· Jika P(a, b) diputar sebesar searah jarum jam (rotasi negatif), dengan pusat rotasi di O(0, 0), maka bayangan yang terjadi sebagai berikut.
a’ = a cos + b sin
b’ = -a sin + b cos
= P’ (a cos + b sin , - a sin + b cos )
ü Rotasi terhadap Titik A (x, y)
· Jika P(a, b) diputar sebesar dengan pusat rotasi di A (x, y), maka bayangan yang terjadi sebagai berikut.
= P’ [(a – x) cos - (b – y) sin , (a – x) sin + (b – y) cos )]
ü Catatan : Rotasi yang berlawanan arah dengan jarum jam sudut rotasinya diberi tanda positif (+). Rotasi yang searah jarum jam sudut rotasi diberi tanda negatif (-).
d. Dilatasi (Perkalian)
Dilatasi adalah transformasi yang mengubah ukuran atau skala suatu bangun geometri (pembesaran/pengecilan), tetapi tidak mengubah bentuk bangun tersebut. Pusat dilatasi terdiri atas dua, yaitu di titik O(0, 0) dan di titik A (x, y). Sementara itu, faktor dilatasi dapat bersifat positif (pembesarannya searah) dan dapat pula bersifat negatif (pembesarannya berlawanan arah). Faktor dilatasi disebut juga dengan faktor skala.
ü Dilatasi dengan Pusat di O(0, 0)
· Jika P(a, b) didilatasikan dengan faktor skala k dan pusat dilatasi di O, maka bayangannya sebagai berikut.
P’ (ka, kb)
ü Dilatasi dengan Pusat di Titik A(x, y)
· Jika P(a, b) didilatasikan dengan faktor skala k dan pusat dilatasi di O, maka bayangannya sebagai berikut.
= P’ [x + k (a – x), y + k (b – y)]
3. Beberapa matriks transformasi yang bersesuaian dengan operasi transformasi yang telah kamu pelajari sebagai berikut :
No.
|
Transformasi
|
Pemetaan
|
Matriks yang Bersesuaian
|
1.
|
Pencerminan terhadap sumbuX
|
(a, b) (a, -b)
| |
2.
|
Pencerminan terhadap sumbuY
|
(a, b) (-a, b)
| |
3.
|
Pencerminan terhadap O (0, 0)
|
(a, b) (-a, -b)
| |
4.
|
Pencerminan terhadap garis y= x
|
(a, b) (b, a)
| |
5.
|
Pencerminan terhadap garis y= - x
|
(a, b) (-b, -a)
| |
6.
|
Rotasi terhadap titik O (0, 0) sebesar
|
(a, b) (a’, b’ )
a’ = a cos - b sin
b’ = a sin + bcos
| |
7.
|
Rotasi terhadap titik O (0, 0) sebesar
|
(a, b) (-b, a)
| |
8.
|
Rotasi terhadap titik O (0, 0) sebesar
|
(a, b) (-a, -b)
| |
9.
|
Rotasi terhadap titik O (0, 0) sebesar
|
(a, b) (-b, -a)
| |
10.
|
Rotasi terhadap titik O (0, 0) sebesar
|
(a, b) ( ka, kb)
|
4. Aplikasi transformasi dalam kehidupan sehari-hari ialah mengedit foto menggunakan photo shop, membatik, bermain catur, permainan komedi putar, permainan baling-baling, menggunakan teleskop, kipas angin, perpindahan jarak (berjalan, berlari), membuka sekrup, bercermin, pertumbuhan dan lain-lain ini adalah aplikasi dari transformasi geometri dalam kehidupan sehari-hari.
BAB IV
DAFTAR PUSTAKA
Anwar, Cecep.Pesta. Matematika Aplikasi Untuk SMA dan MA kelas XII Program Studi Ilmu Alam. Jakarta: Pusat Perbukuan Departemen Pendidikan Nasional.2008.
Herynugroho,dkk. Matematika SMA kelas XII Program IPA. Jakarta: Yudhistira.2010.
Noormandiri. Matematika Jilid 3A Untuk SMA kelas XII . Jakarta: Penerbit Erlangga.
Suprayitno,dkk. Matematika SMA/MA kelas XII IPA. Medan: Agmasu.2013.
Belum ada Komentar untuk "MAKALAH MATEMATIKA KELAS 11: TRANSFORMASI"
Posting Komentar
Tinggalkan komentar terbaik Anda...